Для реализации демонстрационного проекта нам понадобятся:
- 24-позиционный энкодер;
- 16 светодиодов (3 мм);
- драйвер светодиодов A6276 ;
- микроконтроллер PIC18F2550 .
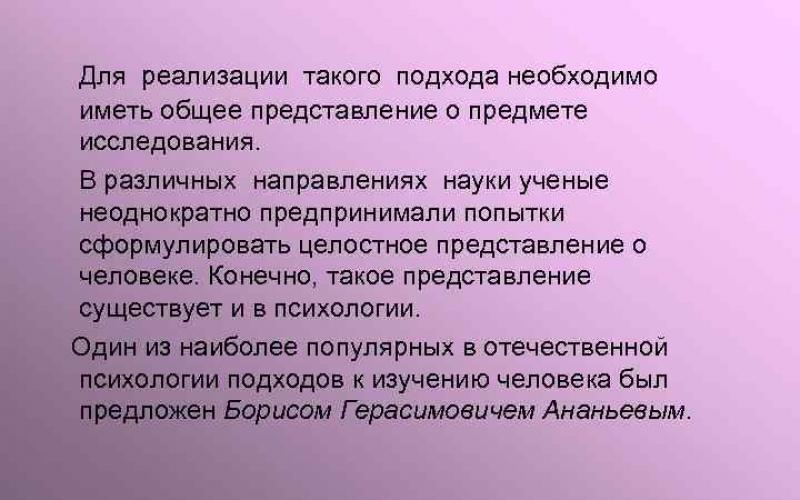
Энкодер - современный и оригинальный элемент управления цифровыми устройствами, и по внешнему виду похож на переменный резистор (см. рисунок ниже). Другое название этого элемента управления - датчик угла, датчик поворота. Вращение вала сопровождается щелчками, например 24 щелчка на один оборот. Энкодер имеет 3 вывода - A, B, C и применяется для быстрого ввода данных в цифровые устройства. Некоторые модели имеют встроенную кнопку, которая срабатывает по нажатию на вал энкодера (добавляется еще один вывод).


Принцип работы энкодера
При повороте на один щелчок, например, вправо, сначала замыкается контакт А+С, затем В+С. Когда в этом щелчке вал доворачивается, в той же последовательности контакты размыкаются. При повороте вала в другую сторону, последовательность замыкания с контактом С меняется, т.е. при повороте влево замыкаются сначала В+С, затем А+С.
Используя энкодер в проектах на микроконтроллерах, возможно, при помощи одного и того же энкодера, реализовать несколько различных типов ввода данных, однако, это требует некоторой обратной связи и визуализации, чтобы пользователь знал, какую информацию он вводит и в какой позиции энкодер.
Принципиальная схема
Выводы энкодера A и B подключаются к портам микроконтроллера RB4 и RB5, вывод С энкодера подключается к «земле». Стоит заметить, что на сигнальные линии выводов A и B должны быть подключены подтягивающие резисторы. Энкодер не случайно подключен к указанным линиям ввода/вывода микроконтроллера: во-первых, порт B имеет встроенные подтягивающие резисторы и нам не придется подключать внешние, во-вторых, порт B микроконтроллера имеет очень полезную функцию - «interrupt-on-change» - прерывание по изменению уровня, что позволит нам отслеживать состояние энкодера.
16 обычных 3 мм светодиодов используются для визуализации вводимых данных и расположены они будут на печатной плате вокруг установленного энкодера. Светодиоды подключены к микросхеме A6276.
Микросхема A6276 представляет собой драйвер светодиодов с 16-битным последовательным вводом информации. Драйвер содержит 16-битный КМОП сдвиговый регистр, соответствующие защелки и драйверы для управления светодиодами и может управлять большим количеством светодиодов, чем это позволяет микроконтроллер. Кроме того, драйвером можно управлять по интерфейсу SPI, что дополнительно сокращает количество используемых линий ввода/вывода и делает проект масштабируемым.
Программное обеспечение микроконтроллера для решения нашей задачи относительно простое. Реализуется 3 режима работы (ввод информации) и обратная связь:
- Режим позиционирования на 360° - в этом режиме светодиоды указывают текущую «позицию» энкодера, пользователь может поворачивать вал энкодера влево и вправо на любой угол;
- Режим «Громкость/Уровень» - в этом режиме светодиоды указывают текущее значение между минимальным и максимальным уровнями диапазона ввода (как уровень громкости в аудиоустройствах);
- Режим 3-позиционного ротационного тумблера - в этом режиме имеется только три выбираемых позиции, которые пользователь выбирает, поворачивая вал энкодера влево/вправо.
Демонстрация работы проекта
Загрузки
ZIP-архив с проектом в среде MPLAB и исходным кодом на Hitech C, а также, принципиальная схема и топология печатной платы находятся .
Наверняка, каждый сталкивался, в повседневной жизни, с энкодером. Например, в автомобильных магнитолах их используют для управления громкостью. Или в компьютерных мышках, колесо прокрутки.
С их помощью очень удобно организовывать меню. Мне известны случаи, когда на очень серьезном и дорогом устройстве, все управление организовано, при помощи всего одного энкодера. Аналогично, в давние времена попадалась модель телефона, где все управление, также было организовано всего одним колесиком.
Прежде всего энкодеры бывают нескольких типов, рассматриваемый в данной статье — механический инкрементальный. В качестве испытуемого, был использован pec12-4220f-s0024. Внешне он похож на переменный резистор, но, в отличие от резистора, он не имеет ограничителей, т.е. может крутиться бесконечно в любую сторону.
Результат работы такого устройства — двоичный код Грея. Получить его можно анализируя состояние ножек, на которые приходят импульсы от энкодера.

Теперь рассмотрим все более детально. Электрически он представляет собой 2 кнопки без фиксации, когда мы начинаем крутить они по очереди срабатывают — сначала одна, затем вторая. В зависимости от того, в какую сторону мы вращаем, одна из кнопок срабатывает раньше или позднее. Для того чтобы узнать, в каком состоянии находятся эти кнопки, ножки порта (к которому подсоединен энкодер) должны быть подтянуты к «+» питания.

На разобранном энкодере 1/3 площадки относится к 1 контакту, 1/3 к 2 контакту, сплошной участок — общий. Когда скользящие контакты попадают на изолированные участки (черные), слышны щелчки. В этот момент энкодер, находится в устойчивом состоянии, когда обе кнопки разомкнуты. На ножках порта будут лог единицы(состояние 11).

Как только мы начинаем вращать в какую либо сторону, один из контактов замыкается на землю. На этой ножеке появится лог 0, на второй ножке по прежнему будет лог1 (состояние 01). Если мы продолжаем вращать, на второй ножке появится лог0(состояние 00). Далее, на первой ножке пропадает контакт (состояние 10), в конце концов энкодер возвращается в устойчивое состояние (11). Т.е. на один щелчок приходится 4 изменения состояния. Временная диаграмма выглядит так:

При вращении в противоположную сторону, идея остается прежней, только сначала будет замыкаться, вторая ножка.
Если выписать эти состояния в двоичной системе и перевести их в десятичную, то получится следующий порядок(для вращения в одну сторону):
11=3
01=1
00=0
10=2
При вращении в противоположную сторону:
11=3
10=2
00=0
01=1
Теперь осталось понять, как эти значение обрабатывать. Допустим, энкодер подключен к ножкам порта В0 и В1. Нам нужно прочитать эти ножки. Есть довольно хитрый способ, но для начала нам нужно понять операцию «логического и» (&).
Результат будет равен единице, только если оба числа равны 1, т.е. результат операции 1&1, будет равен 1. Следовательно 1&0=0, 0&0=0, 0&1=0.
Логическое & поможет нам вычленить из целого порта, только интересующие нас ножки. Т.е. операция x=0b00000011 & PINB; позволит нам прочитать в переменную «х» состояние первых двух ножек, независимо от того, что находится на остальных ножках. Число 0b00000011 можно перевести в шестнадцатеричную систему 0х3.
Теперь все необходимые знания для написания прошивки у нас есть. Задача: увеличивать/уменьшать переменную Vol, при помощи энкодера, результат вывести на lcd дисплей.
| #include |
#include
В качестве пояснений: таймер 1 настроен на срабатывание 1000 раз в секунду, строкой NewState=PINB & 0b00000011; считываем состояние ножек 0 и 1 портаВ. if(NewState!=OldState) если состояние не изменилось, значит вращения нет.
Если состояние изменилось конструкция switch определяет в какую сторону было произведено вращение, в зависимости от этого увеличивается значение переменной downState(влево) или upState(вправо).
От щелчка до следующего щелчка 4 изменения состояния, поэтому 1 раз за 4 импульса изменяем переменную Vol. Ее же и выводим на дисплей. Прошивка доступна
Инкрементальный энкодер внешне похож на потенциометр , но в отличие от потенциометра у него нет крайних положений, он может вращаться в обоих направлениях неограниченное количество оборотов. Также надо отметить, что инкрементальный энкодер вращается не так плавно как потенциометр, а шагами. Его можно увидеть на автомобильной магнитоле, осциллографе , музыкальном центре, стиральной машине и прочей технике, где регулировка какого-то параметра осуществляется в больших пределах. Конечно, параметры можно изменять и с помощью кнопок, например, для того чтобы сделать музыку на 20 значений громче, при управлении кнопкой, надо нажать её 20 раз, а при управлении энкодером, провернуть его на определённый угол, в зависимости от алгоритма обработки.
Инкрементальный энкодер
представляет собой два контакта, порядок замыкания которых зависит от направления вращения
.

По сути инкрементальный энкодер преобразует вращение вала в электрические импульсы , содержащие информацию о направлении вращения.
Давайте соберём тестовую схему изображенную на картинке выше и подключимся к выводу A и B осциллографом
, резисторы подтяжки - 4.7К.
Покрутим энкодер по часовой стрелке.

Теперь против часовой.

На осциллограммах видно, что в зависимости от направления вращения, изменяется порядок замыкания контактов. Но фронта не всегда получаются такие красивые.

Так как контакты механические, они подвержены дребезгу, то есть при замыкании за счёт упругости материалов, возникают многократные неконтролируемые замыкания и размыкания, которые можно увидеть на осциллограмме выше.
Бороться с дребезгом можно двумя способами, первый
состоит в добавлении конденсаторов и резисторов, как показано на картинке ниже.

Так как дребезг явление кратковременное, он легко гасится конденсатором.

На осциллограмме видно, что после установки конденсаторов, фронты стали менее крутыми, а дребезг исчез.
Второй способ - программный и тут всё зависит от реализации опроса выводов энкодера. Если состояние энкодера отслеживается с помощью внешних прерываний , то после срабатывания прерывания необходимо сделать задержку 20 - 30 миллисекунд, во время которой МК не будет реагировать на изменение состояния вывода, то есть не будет чувствовать дребезг. Если опрос выводов энкодера реализован на таймере , то интервал между опросами должно быть больше длительности дребезга, те же 20 -30 миллисекунд.
Давайте рассмотрим методы обработки данных, приходящих с энкодера
.
Первый метод, заключается в том, что одну из ножек энкодера мы подключаем к выходу внешних прерываний и настраиваем её на прерывание по спадающему фронту. В прерывании мы проверяем состояние другой ножки и если на ней ноль, то вращение происходит в одну сторону, иначе в другую. Ниже приведён код, реализующий этот метод для AVR.
Второй метод, заключается в сравнении текущего состояния и предыдущего
. Давайте выразим логические уровни последовательности импульсов в виде нулей и единичек.

Тогда мы получим конечное число состояний энкодера. Первая цифра - логический уровень первого вывода энкодера, вторая - логический уровень второго вывода.
Предположим последнее состояние в котором находился энкодер равно трем, если следующее состояние будет равно единице, то он вращается в одну сторону, если двум, то в другую. Получается, что можно фиксировать переход из одного состояние в другое и определять направление вращения, но наиболее простой является реализация при переходе от 11 к 01 и 10. Ниже приведён код реализующий описанный алгоритм для AVR,
#define F_CPU 8000000UL
#include
Энкодер покупал
Энкодер для частотника по своему внешнему виду похож на переменный резистор или на потенциометр. Те же три вывода, тот же корпус панели. На этом его сходство заканчивается. Внутри у него два переключателя, у которых есть общий вывод задач управления и два своих.
Чтобы энкодер заработал, средний вывод нужно подключить к земле, а два остальных через резисторы к питанию. Съем сигнала управления нужно производить непосредственно с выводов панели энкодера.

Теперь представим, что энкодер идеальный и его контакты не страдают дребезгом. Подключим к выводам энкодера осциллограф и начнем вращать ручку энкодера. Импульсы будут сдвинуты относительно друг друга на 90 градусов. Если крутить ручку мощности (кВт) вправо, влево или назад, то будем иметь последовательности панели управления:

Если осциллограммы как применение последовательности задач логических нулей и единиц, то они будут иметь такой вид:

Возьмем обычный энкодер, у которого есть дребезг контактов. Зона дребезга:

При переключении с логической единицы на логический ноль возникает дребезг. С дребезгом можно бороться двумя способами: аппаратным и программным применением.
Аппаратный способ – это подключение серии конденсаторов частотника, триггеров Шмитта, как указано на схеме панели управления:

Рекомендуется применять метод борьбы с дребезгом – программный. Такой метод описан в библиотеке Ротери. Данная библиотека содержит несколько функций, которые нужны для настройки выводов векторного контроллера на ввод, и подключение подтягивающих мощность (кВт) резисторов. В библиотеке нужно указывать соответствующие команды и задачи. Данной командой включается подтягивающий резистор внутри .
Функция серии Get position vfd возвращает значение энкодера. Данная фукнция нужна для получения количества импульсов, которые считал энкодер. Функция set Position vfd нужна для загрузки значения, с которого энкодер начнет свой счет.
Функция tick должна быть рассмотрена подробнее. Переменные этой функции sig1 и sig2 записывают состояние векторного pin, к которой подключен энкодер. Дальше эти pin записываются в переменную thisState vfd, которая является текущим состоянием энкодера. Если текущее состояние энкодера не равно предыдущему, то вычисляются новые направления счета и количество импульсов мощности сохраняется в переменной Position. Когда энкодер вернется в свое начальное векторное положение, произойдет сдвиг вправо на два разряда, и новое значение управления нужно записать в переменную PositionExt. Данная переменная нужна для сохранения серии результатов задач, которые будут иметь применение в основной программе.
Счет
Проанализировав состояние энкодера при вращении влево и вправо, составляем таблицу:

Его начальное положение 1-1. При повороте вправо произошел щелчок, единица стала логическим нулем. Новое значение this State vfd равно 01. Согласно команды данный результат суммируется со значением переменной Position.
Из-за того, что произошел дребезг, позиция стала 11, после перерасчета порядковый номер стал 7. После того, как дребезг закончился, нужно фиксировать новое положение 01 и к предыдущему нулю добавляется единица. При повороте энкодера произошел один щелчок, и значение переменной Position стало единицей.
Происходит второй щелчок при повороте энкодера направо, и вместо позиции 01 мы имеем позицию 00. После того, как весь дребезг закончится, на выходе управления также имеем значение единицы. При четвертом щелчке, когда позиция с 10 стала 11, мы имеем значение 6. После окончания дребезга остается 6.
В некоторых энкодерах имеет применение кнопка панели. При ее нажатии и отпускании тоже будет дребезг контактов, нужно применить библиотеку Bounce. Функции этой библиотеки нужны для задания pin, к которому будет подключена кнопка, задач времени задержки в миллисекундах. Если произошло нажатие на кнопку, то функция мощности (кВт) возвращает векторное значение true, если нет, то false vfd.
Принципиальная схема подключения энкодера к преобразователю частоты

В станкостроении энкодеры широко применяются для преобразователей частоты асинхронных двигателей. Они монтируются как датчики обратной связи по своей скорости. Такие энкодеры имеют большую дискретность от 100 импульсов на оборот до 1 млн импульсов на оборот. У этой марки дискретность равна 500 имп. на оборот.
Энкодеры подразделяются на виды задач по . Они бывают абсолютными и инкрементальными. Наш энкодер выполняет обычную функцию – выдает сигнал дифференцирования при отключении мощности питания, и ее подачи снова. Раннее состояние не сохраняется.
Энкодеры абсолютного вида имеют внутреннюю память, которая помнит последние положения. Зачем нужна память, и зачем сохранять эти данные? В заводских условиях станкостроения перед перемещением определенного устройства в первую очередь указывают нулевую точку. Такой процесс называется реферированием, то есть, выход в нуль.
Применение датчика абсолютного вида дает возможность уйти от этой процедуры на второй раз, сократить время при условии, что система имеет ограничения для перемещений.
Рассмотрим энкодеры синуса и косинуса. Они выдают выходной сигнал косинуса или синуса. Далее, с помощью устройства интерполятора мощности образуют из них импульсы. Сигналы такого вида можно изменять в размерах. Питание энкодера осуществляется от напряжения 5 вольт.
Сигнал «А» — это сигнал импульса прямого типа. Количество импульсов с этого сигнала приходит на каждом обороте. Оно равно 500 (дискретность датчика).
Сигнал «В» — тоже прямой сигнал импульса. С него на каждом обороте поступает число импульсов по дискретности датчика, который смещен от канала «А» на 90 градусов (500).
Сигнал «R» — это сигнал метки «нуль». С одного оборота датчика получается один импульс.
В энкодерах промышленного назначения используется сигнал дифференцирования, для работы с частотным преобразователем (частотником). Название у него сложное, а на самом деле все просто. Все каналы отдельно копируются своей инверсией. Это необходимо для отдавания сигнала на значительные расстояния. Выходной канал энкодера подсоединяется к приемнику специального назначения, сделанному на усилителях операционного вида. Импульс в итоге определяется в совокупности двух сигналов.
Подключение

Подключение простое. Подсоединяем напряжение 5 вольт на выходы энкодера. У нас раскладка: провод коричневого цвета – 0 В, белого цвета — +5 В, розовый, зеленый и красный – А, В, R.
Программа подключения энкодера базируется на прерываниях каналов А и В. Срабатывания прерываний происходят на переднем фронте. Получается ситуация, когда происходит торможение энкодера в момент растрового пересечения и выходной сигнал канала всегда остается положительным. Подсчет импульсов непрерывно ведется счетчиком.
В нашем случае мы не будем применять прерывания, потому что мы работаем с 4-мя датчиками, они эксплуатируются одновременно. Если применять схему прерываний, наверняка возникнет ситуация потери импульсов. У нас эта проблема решается путем установления значка наличия движения. А мы рассматривали эксплуатацию энкодеров промышленного назначения.
Работа счетчика импульсов на основе модуля энкодера
Счетчик работает в связке с модулем семиразрядного индикатора, который и будет отображать количество накрученных энкодером импульсов. При включении значение счетчика равно нулю.

Покрутим ручку энкодера по часовой стрелке. Значение счетчика инкрементируется на единицу при каждом щелчке энкодера. Наибольшее число можно накрутить 999999999. это число должно заполнить все разряды нашего семисегментного индикатора. Если вращать ручку дальше, то счетчик обнулится, начнет снова считать с нуля.
Для примера накрутим 120 импульсов. Теперь скручиваем обратно, вращая ручку против часовой стрелки. Центральная ось энкодера работает как кнопка. Она очищает от нулей свободные разряды индикатора. У кнопки есть небольшой дребезг контактов, поэтому выключение и включение происходит не сразу. Программным путем, дребезг устраняется. Это основа работы с модулем энкодера.
Узнайте, как использовать инкрементальный поворотный энкодер в проекте на Arduino.
Поворотный энкодер представляет собой электромеханическое устройство, которое преобразует вращательное движение в цифровую или аналоговую информацию. Он очень похож на потенциометр, но может вращаться бесконечно как по часовой стрелке, так и против часовой стрелки. Существует несколько типов поворотных энкодеров. Двумя основными типами являются абсолютные и относительные (инкрементальные) энкодеры. В то время как абсолютный энкодер выдает значение, пропорциональное текущему углу вала, инкрементальный энкодер выдает шаг движения вала и его направление. Поворотные энкодеры становятся всё более и более популярными в потребительской электронике, особенно в качестве ручек управления, в дополнение к приложениям во многих других областях. Они заменяют собой потенциометры и кнопки навигации, где требуются быстрая навигация, настройка, ввод данных и выбор пункта меню. Некоторые энкодеры также включают в себя встроенную кнопку, которая создает дополнительный вход для процессора, который может использоваться в качестве другой пользовательской команды в интерфейсе управления. На рисунке ниже вы можете увидеть типовой инкрементальный поворотный энкодер с кнопкой включения.
В данной статье мы покажем вам, как использовать инкрементальный поворотный энкодер в проекте на Arduino. Мы объясним, как бороться с дребезгом контактов и интерпретировать сигналы энкодера в программе микроконтроллера, используя прерывания.
Сигнал квадратурного выхода инкрементального энкодера
Инкрементальный поворотный энкодер во время поворота вала генерирует два выходных сигнала, что также называется квадратурным выходом. В зависимости от направления один сигнал опережает другой. Ниже вы можете увидеть форму выходного сигнала инкрементального поворотного энкодера и ожидаемую последовательность битов.
Как видно из рисунка, оба выхода в изначально находятся в состоянии логической единицы. Когда вал энкодера начинает вращаться в направлении по часовой стрелке, первым падает до логического нуля состояние на выходе A, а затем с отставанием за ним следует и выход B. При вращении против часовой стрелки всё происходит наоборот. Временные интервалы на диаграмме сигнала зависят от скорости вращения, но отставание сигналов гарантируется в любом случае. На основе этой характеристики инкрементального поворотного энкодера мы напишем программу для Arduino.
Фильтрация дребезга контактов механического энкодера
Механические энкодеры имеют встроенные переключатели, которые формируют сигнал на квадратурном выходе во время вращения.
Когда имеем дело с сигналами энкодера, основной проблемой является дребезг контактов. Он вызывает ошибочное определение направления вращения и величины поворота вала энкодера и делает использование энкодеров проблематичным. Мы можем избавиться от дребезга контактов, отфильтровывая его в программе или используя дополнительные схемы фильтрации.
Фильтрация шума в программном обеспечении микроконтроллера является одним из вариантов фильтрации, но она обладает некоторыми недостатками. Вам необходимо написать более сложный код для обработки шума. Фильтрация займет время обработки и внесет задержки в основной поток программы. Вам может потребоваться установить таймеры, чтобы игнорировать интервалы дребезга контактов. В конце концов, возможно, у вас не получится получить удовлетворительный и надежный результат.
Фильтрация шума с помощью дополнительных аппаратных средств проще, и она останавливает шум еще в его источнике. Вам понадобится RC фильтр первого порядка. На рисунке ниже вы можете увидеть, как выглядит сигнал после использования RC фильтра.
RC-фильтр замедляет время спада и время нарастания и обеспечивает аппаратное удаление дребезга контактов. При выборе пары резистор-конденсатор вы должны учитывать максимальную частоту вращения. Иначе будет отфильтрован и ожидаемый отклик энкодера.
Простое приложение
Мы создадим приложение, демонстрирующее, как использовать поворотный энкодер в проекте на Arduino. Мы будем использовать энкодер для навигации, ввода данных и выбора. Ниже приведена принципиальная схема приложения.
Схема построена на базе платы Arduino Uno. Для графического интерфейса используется LCD дисплей Nokia 5110. В качестве средств управления добален механический поворотный энкодер с кнопкой и RC-фильтрами.
Мы разработаем простое программное меню, в котором и продемонстрируем работу поворотного энкодера.
Обработка сигналов энкодера с помощью прерываний
Сигналы энкодера должны быть обнаружены и интерпретированы в программе как можно быстрее, чтобы не блокировать основной поток программы. Мы можем детектировать сигналы путем опроса в основном цикле, или используя прерывания. Опрос не эффективен, так как вам необходимо зарезервировать время и ресурсы в основном цикле, что приводит к дополнительным задержкам. Использование прерываний - это более быстрое и экономичное решение. Мы покажем вам, как использовать прерывания для обработки сигналов энкодера.
В Atmega328 есть два типа прерываний, которые можно использовать для этих целей; внешнее прерывание и прерывание по изменению состояния вывода. Выводы INT0 и INT1 назначены на внешнее прерывание, а PCINT0 - PCIN15 назначены на прерывание по изменению состояния вывода. Внешнее прерывание может определить, произошел ли спад или нарастание входного сигнала, и может быть запущено при одном из следующих состояний: нарастание, спад или переключение. Для прерывания по изменению состояния выводов существует гораздо больше аппаратных ресурсов, но оно не может обнаруживать нарастающий и спадающий фронты, и оно вызывается, когда происходит любое изменение логического состояния (переключение) на выводе.
Чтобы использовать прерывание по изменению состояния выводов, подключите выходы поворота энкодера A и B к выводам A1 и A2 , а выход кнопки - к выводу A0 платы Arduino, как показано на принципиальной схеме. Установите выводы A0 , A1 и A2 в режим входа и включите их внутренние подтягивающие резисторы. Включите прерывание по изменению состояния выводов в регистре PCICR и включите прерывания для выводов A0 , A1 и A2 в регистре PCMS1 . При обнаружении любого изменения логического состояния на одном из этих входов будет вызовано ISR(PCINT1_vect) (прерывание по изменению состояния выводов).
Поскольку прерывание по изменению состояния выводов вызывается для любого логического изменения, нам необходимо отслеживать оба сигнала (и A, и B) и обнаруживать вращение при получение ожидаемой последовательности. Как видно из диаграммы сигналов, движение по часовой стрелке генерирует A = …0011… и B = …1001… . Когда мы записываем оба сигналы в байты seqA и seqB , сдвигая последнее чтение вправо, мы можем сравнить эти значения и определить новый шаг вращения.
Вы можете увидеть часть кода, включающую инициализацию и функцию обработки прерывания по изменению состояния выводов.
Void setup() { pinMode(A0, INPUT); pinMode(A1, INPUT); pinMode(A2, INPUT); // Включить внутренние подтягивающие резисторы digitalWrite(A0, HIGH); digitalWrite(A1, HIGH); digitalWrite(A2, HIGH); PCICR = 0b00000010; // 1. PCIE1: Включить прерывание 1 по изменению состояния PCMSK1 = 0b00000111; // Включить прерывание по изменению состояния для A0, A1, A2 } void loop() { // Основной цикл } ISR (PCINT1_vect) { // Если прерывание вызвано кнопкой if (!digitalRead(A0)) { button = true; } // Если прерывание вызвано сигналами энкодера else { // Прочитать сигналы A и B boolean A_val = digitalRead(A1); boolean B_val = digitalRead(A2); // Записать сигналы A и B в отдельные последовательности seqA <<= 1; seqA |= A_val; seqB <<= 1; seqB |= B_val; // Маскировать четыре старших бита seqA &= 0b00001111; seqB &= 0b00001111; // Сравнить запсанную последовательность с ожидаемой последовательностью if (seqA == 0b00001001 && seqB == 0b00000011) { cnt1++; left = true; } if (seqA == 0b00000011 && seqB == 0b00001001) { cnt2++; right = true; } } }
Использование внешнего прерывания делает процесс более простым, но поскольку для этого прерывания назначено только два вывода, то вы не сможете использовать его для других целей, если займете его энкодером. Чтобы использовать внешнее прерывание, вы должны установить выводы 2 (INT0) и 3 (INT1) в режим входа и включить их внутренние подтягивающие резисторы. Затем выберите вариант спадающего фронта для вызова обоих прерываний в регистре EICRA . Включите внешние прерывания в регистре EIMSK . Когда начнется вращение вала энкодера, сначала ведущий сигнал падает до логического нуля, а второй сигнал некоторое время остается на уровне логической единицы. Поэтому нам нужно определить, какой из сигналов во время прерывания находится в состоянии логической единицы. После того, как ведущий сигнал упал до логического нуля, через некоторое время второй сигнал также упадет до логического нуля, что вызовет другое прерывание. Но этот раз и другой (ведущий) сигнал будет на низком логическом уровне, что означает, что это не начало вращения, поэтому мы игнорируем его.
Ниже вы можете увидеть часть кода, включающую в себя инициализацию и функцию обработки внешнего прерывания.
Void setup() { pinMode(2, INPUT); pinMode(3, INPUT); // Включить внутренние подтягивающие резисторы digitalWrite(2, HIGH); digitalWrite(3, HIGH); EICRA = 0b00001010; // Выбрать вызов по спадающему фронту EIMSK = 0b00000011; // Включить внешнее прерывание } void loop() { // Основной цикл } ISR (INT0_vect) { // Если второй сигнал находится в состоянии логической единицы, то это новое вращение if (digitalRead(3) == HIGH) { left = true; } } ISR (INT1_vect) { // Если второй сигнал находится в состоянии логической единицы, то это новое вращение if (digitalRead(2) == HIGH) { right = true; } }
Полный код скетча Arduino, включающий основной цикл приведен ниже:
#include
Энкодер в действии вы можете увидеть на видео, приведенном ниже.
Наливной пол

Родился иоанн богослов. Апостол иоанн богослов. Тропарь и кондак святому апостолу и евангелисту Иоанну Богослову
Электрический теплый пол

Женщина-Скорпион — характеристика и гороскоп Психологический портрет личности скорпиона после 30 лет
Лоджия и балкон